Flashline-16 EVA Report-02 09-07-2024
Extra-Vehicular Activity Report 02
Leader: Michael Andrews
Team: Tiffany Swarmer
Destination(s): as far upstream as possible for water samples
Transport: ATV
Duration: 2.55 hrs
Time: 1822-2053
Furthest coordinates from the station: 75.447054 N, 89.901329 W
Expedition Objectives:
- Measure the depth of permafrost at a high elevation location
- Take a water sample for nanoplastics that is upstream of any research station
- Test real-time communications via Starlink with the research station
- Explore the terrain west of base
Equipment Used:
- Tape measurer
- Threaded rod (36” length)
- Rubber mallet
- Rubber gloves
- IPA
- Vials (3)
- Starlink user terminal
- Mobile phone (to log GPS coordinates and communicate)
- Walkie-talkie
Expedition Description:
HSO Swarmer and I exited the habitat and carried our gear to the ATVs. Small equipment was stored in space suit pockets, and large equipment was bound to the ATV’s front and rear racks via bungee cords. I led the group of three ATVs, followed by Swarmer and then Crew Engineer Robbins on bear watch.
We did two minor river crossings via ATV, and then transitioned to a trail from previous missions. We would spend the entire EVA on this trail.
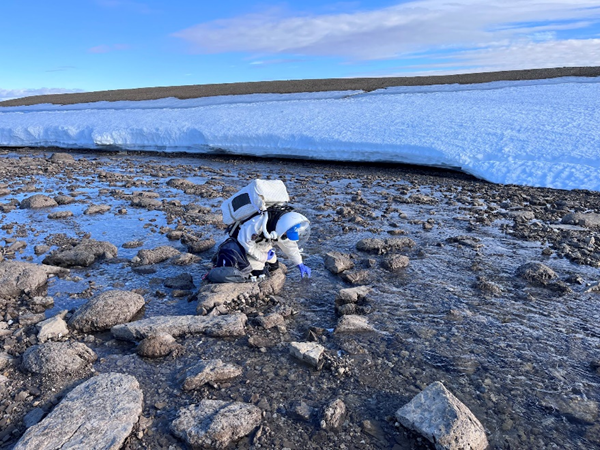
After a few minutes of traversing, we found a location that would accomplish both our scientific objectives: water sampling and permafrost depth measurements. We stopped at a hill that overlooked the river and parked our vehicles. This location was picked for two reasons: it was upstream of any research station (which meant we expected the lowest possible nanoplastic presence of our samples) and its hill was free of any runoff routes (which would minimize permafrost thawing).
Swarmer descended the hill with the vials, gloves, and IPA. She carefully walked out halfway along the stream, hopping along small rocks. She sterilized her gloves and vials with IPA and took triplicate samples of the water, careful to avoid any silt being mixed with the sample.
Simultaneously, I gathered all pieces of the Starlink user terminal and assembled them. I monitored Starlink’s status as it booted up and determined which satellites it would interact with. The process took about 15 minutes, which is understandable considering the fact that it had very recently been disconnected and repositioned in another location. When WiFi service was restored, I was able to hold a real-time conversation with Commander Cinelli in the habitat via the ECHO application. I was able to demonstrate real-time photo transfer, and would later upload permafrost depth measurements via ECHO. The messages would also arrive to Mission Support back on Earth about 14 minutes later.
Swarmer and I reconvened after our separate objectives in order to take permafrost depth samples. Three clusters of measurements were taken and sent via ECHO, with only one cluster appearing to occur under a buried rock.
Once the final objective was completed, we noted that we had plenty of extra time allocated to the mission, and sufficient battery on our oxygen packs to continue. As a result, we communicated amongst each other and agreed to continue down the trail for another 45 minutes and turn back. The trail veered farther from the river and became very flat and barren. The crew stopped to observe a large lone rock and documented with photos.
The trail ended at a hill with a snowbank, where the crew dismounted and scaled it halfway up. A stromatolite was found, and its GPS coordinates were logged for future missions (75.447054 N, 89.901329 W).
Along the way back to base, two smaller forks were found on the ATV trail, but for both instances they faded within a mile of traversing to a point where we couldn’t determine where the trail went next. In order to minimize our impact on the environment, we decided not to risk developing new tracks on the island. Therefore, the team had no additional notable encounters until returning to the station at 8:53 PM.